Image Registration Method 3
Overview
If you are not familiar with the SimpleITK registration framework we recommend that you read the registration overview before continuing with the example.
Example Run
Running the Python code with the following inputs:
main('BrainProtonDensitySliceBorder20.png', 'BrainProtonDensitySliceShifted13x17y.png', 'displaceMeth3.hdf5')
produces the text and images below.
Output Text
Text Output (click triangle to collapse)
Estimated Scales: (29682.41582933708, 29682.168476696, 1.0000000000010232, 0.999999999998181)
0 = -0.99671 : (1.0001225188582936, -4.8155319621057874e-05, 14.24580144271548, 18.231972935092553)
1 = -0.90442 : (1.0001395698120492, -5.723494632868289e-05, 13.436891660253242, 17.644040146872914)
2 = -0.97294 : (1.0000524825397714, -3.538901200507155e-05, 12.784457666827517, 16.886194597858392)
3 = -0.99664 : (1.000078552246351, -3.493898453141627e-05, 13.248020397809663, 17.07357013992443)
4 = -0.99617 : (1.0000080585357958, -3.574957852612509e-05, 13.003964467172034, 17.01937883295938)
5 = -0.99998 : (0.9999690242080485, -8.938378761798914e-06, 12.941455002408405, 16.77731982244243)
6 = -0.99743 : (0.9999729946034386, -1.4195394490341945e-05, 12.980498953463153, 16.89606564275891)
7 = -0.99946 : (0.9999822072360259, -1.9442192886012526e-05, 13.009300985166485, 17.01770216218198)
8 = -0.99998 : (1.0000081565952237, -1.536015920575109e-05, 12.97497046153363, 16.965475115002747)
9 = -0.99990 : (1.000006961859454, -1.5839846033647187e-05, 12.996178272885958, 16.98842704816722)
10 = -0.99999 : (0.999997104263667, -1.5781032972153657e-05, 13.008157869541614, 17.01728968260679)
11 = -0.99998 : (0.9999981089260577, -1.480066274538104e-05, 13.000149494110696, 17.003873030789478)
12 = -1.00000 : (1.0000035245702283, -1.1964202117479094e-05, 12.999557108219037, 16.988259265497895)
13 = -0.99999 : (1.0000015232779387, -1.2092316764425097e-05, 12.999892054939323, 16.996064581822232)
14 = -1.00000 : (0.9999991283248564, -1.1669994922994523e-05, 13.00013101903772, 17.003873425942555)
15 = -1.00000 : (0.9999999572679382, -1.1067338273415268e-05, 12.99999566483145, 16.99996952183884)
16 = -1.00000 : (1.0000015262190347, 2.7428357741776532e-05, 13.001481019896447, 17.00123717053477)
17 = -1.00000 : (1.0000010761172178, 2.70338949452921e-05, 13.00064749562188, 17.000728337318556)
18 = -1.00000 : (1.0000004942557568, 2.6224543927636213e-05, 12.999879933384591, 17.000124581130446)
19 = -1.00000 : (0.9999997860745542, 2.334309634129523e-05, 13.000293057931712, 16.99986431610512)
20 = -1.00000 : (0.9999997971406921, 2.288036936123565e-05, 13.000070149678, 16.99996389693141)
21 = -1.00000 : (0.9999999481117745, 2.1399925381340785e-05, 12.999868757877147, 17.000101896108283)
22 = -1.00000 : (0.999999997953508, 2.0861222466294866e-05, 12.999980029544846, 17.000051701641695)
23 = -1.00000 : (1.0000000486509963, 1.633859430051924e-05, 13.000031070402398, 16.999940906626833)
-------
itk::simple::Similarity2DTransform
Similarity2DTransform (0x65515da8a380)
RTTI typeinfo: itk::Similarity2DTransform<double>
Reference Count: 3
Modified Time: 2649
Debug: Off
Object Name:
Observers:
none
Matrix:
1 -1.63386e-05
1.63386e-05 1
Offset: [13.0022, 16.9981]
Center: [111.204, 131.591]
Translation: [13, 16.9999]
Inverse:
1 1.63386e-05
-1.63386e-05 1
Singular: 0
Angle = 1.63386e-05
Scale =1
Optimizer stop condition: RegularStepGradientDescentOptimizerv4: Step too small after 24 iterations. Current step (6.10352e-05) is less than minimum step (0.0001).
Iteration: 25
Metric value: -0.9999999568784146
Input Images
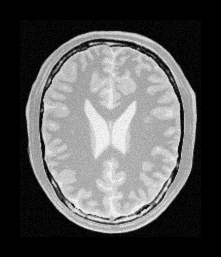
Fixed Image |
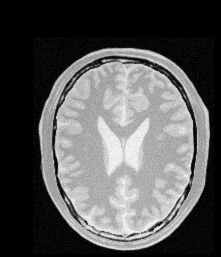
Moving Image |
Output Image
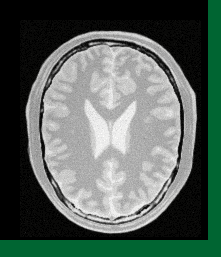
Composition Image
Code
using System;
using itk.simple;
namespace itk.simple.examples
{
class IterationUpdate : Command
{
private ImageRegistrationMethod m_Method;
public IterationUpdate(ImageRegistrationMethod m)
{
m_Method = m;
}
public override void Execute()
{
if (m_Method.GetOptimizerIteration() == 0)
{
VectorDouble scales = m_Method.GetOptimizerScales();
Console.Write("Estimated Scales: [{0}", scales[0]);
for (int i = 1; i < scales.Count; i++)
{
Console.Write(", {0}", scales[i]);
}
Console.WriteLine("]");
}
VectorDouble pos = m_Method.GetOptimizerPosition();
Console.Write("{0,3} = {1,7:F5} : [",
m_Method.GetOptimizerIteration(),
m_Method.GetMetricValue());
Console.Write("{0:F5}", pos[0]);
for (int i = 1; i < pos.Count; i++)
{
Console.Write(", {0:F5}", pos[i]);
}
Console.WriteLine("]");
}
}
class ImageRegistrationMethod3
{
static void Main(string[] args)
{
if (args.Length < 3)
{
Console.WriteLine("Usage: ImageRegistrationMethod3 <fixedImageFile> <movingImageFile> <outputTransformFile>");
return;
}
var fixedImage = SimpleITK.ReadImage(args[0], PixelIDValueEnum.sitkFloat32);
var movingImage = SimpleITK.ReadImage(args[1], PixelIDValueEnum.sitkFloat32);
ImageRegistrationMethod R = new ImageRegistrationMethod();
R.SetMetricAsCorrelation();
R.SetOptimizerAsRegularStepGradientDescent(2.0, // learningRate
1e-4, // minStep
500, // numberOfIterations
0.5, // relaxationFactor
1e-8); // gradientMagnitudeTolerance
R.SetOptimizerScalesFromIndexShift();
Transform tx = SimpleITK.CenteredTransformInitializer(fixedImage, movingImage, new Similarity2DTransform());
R.SetInitialTransform(tx);
R.SetInterpolator(InterpolatorEnum.sitkLinear);
IterationUpdate cmd = new IterationUpdate(R);
R.AddCommand(EventEnum.sitkIterationEvent, cmd);
Transform outTx = R.Execute(fixedImage, movingImage);
Console.WriteLine("-------");
Console.WriteLine(outTx.ToString());
Console.WriteLine("Optimizer stop condition: " + R.GetOptimizerStopConditionDescription());
Console.WriteLine(" Iteration: " + R.GetOptimizerIteration());
Console.WriteLine(" Metric value: " + R.GetMetricValue());
SimpleITK.WriteTransform(outTx, args[2]);
ResampleImageFilter resampler = new ResampleImageFilter();
resampler.SetReferenceImage(fixedImage);
resampler.SetInterpolator(InterpolatorEnum.sitkLinear);
resampler.SetDefaultPixelValue(100);
resampler.SetTransform(outTx);
Image output = resampler.Execute(movingImage);
Image simg1 = SimpleITK.Cast(SimpleITK.RescaleIntensity(fixedImage), PixelIDValueEnum.sitkUInt8);
Image simg2 = SimpleITK.Cast(SimpleITK.RescaleIntensity(output), PixelIDValueEnum.sitkUInt8);
Image cimg = SimpleITK.Compose(simg1, simg2, SimpleITK.Divide(SimpleITK.Add(simg1, simg2), 2));
if (Environment.GetEnvironmentVariable("SITK_NOSHOW") == null)
{
SimpleITK.Show(cimg, "ImageRegistration3 Composition");
}
}
}
}
#include <SimpleITK.h>
#include <iostream>
#include <stdlib.h>
#include <iomanip>
namespace sitk = itk::simple;
class IterationUpdate : public sitk::Command
{
public:
IterationUpdate(const sitk::ImageRegistrationMethod & m)
: m_Method(m)
{}
void
Execute() override
{
// use sitk's output operator for std::vector etc..
using sitk::operator<<;
if (m_Method.GetOptimizerIteration() == 0)
{
std::cout << "Estimated Scales: " << m_Method.GetOptimizerScales() << std::endl;
}
// stash the stream state
std::ios state(NULL);
state.copyfmt(std::cout);
std::cout << std::fixed << std::setfill(' ') << std::setprecision(5);
std::cout << std::setw(3) << m_Method.GetOptimizerIteration();
std::cout << " = " << std::setw(7) << m_Method.GetMetricValue();
std::cout << " : " << m_Method.GetOptimizerPosition() << std::endl;
std::cout.copyfmt(state);
}
private:
const sitk::ImageRegistrationMethod & m_Method;
};
int
main(int argc, char * argv[])
{
if (argc < 4)
{
std::cout << "Usage: " << argv[0] << " <fixedImageFile> <movingImageFile> <outputTransformFile>" << std::endl;
return 1;
}
sitk::Image fixed = sitk::ReadImage(argv[1], sitk::sitkFloat32);
sitk::Image moving = sitk::ReadImage(argv[2], sitk::sitkFloat32);
sitk::ImageRegistrationMethod R;
R.SetMetricAsCorrelation();
R.SetOptimizerAsRegularStepGradientDescent(2.0, // learningRate
1e-4, // minStep
500, // numberOfIterations
0.5, // relaxationFactor
1e-8); // gradientMagnitudeTolerance
R.SetOptimizerScalesFromIndexShift();
sitk::Transform tx = sitk::CenteredTransformInitializer(fixed, moving, sitk::Similarity2DTransform());
R.SetInitialTransform(tx);
R.SetInterpolator(sitk::sitkLinear);
IterationUpdate cmd(R);
R.AddCommand(sitk::sitkIterationEvent, cmd);
sitk::Transform outTx = R.Execute(fixed, moving);
std::cout << "-------" << std::endl;
std::cout << outTx.ToString() << std::endl;
std::cout << "Optimizer stop condition: " << R.GetOptimizerStopConditionDescription() << std::endl;
std::cout << " Iteration: " << R.GetOptimizerIteration() << std::endl;
std::cout << " Metric value: " << R.GetMetricValue() << std::endl;
sitk::WriteTransform(outTx, argv[3]);
sitk::ResampleImageFilter resampler;
resampler.SetReferenceImage(fixed);
resampler.SetInterpolator(sitk::sitkLinear);
resampler.SetDefaultPixelValue(100);
resampler.SetTransform(outTx);
sitk::Image out = resampler.Execute(moving);
sitk::Image simg1 = sitk::Cast(sitk::RescaleIntensity(fixed), sitk::sitkUInt8);
sitk::Image simg2 = sitk::Cast(sitk::RescaleIntensity(out), sitk::sitkUInt8);
sitk::Image cimg = sitk::Compose(simg1, simg2, sitk::Divide(sitk::Add(simg1, simg2), 2));
if (getenv("SITK_NOSHOW") == nullptr)
{
sitk::Show(cimg, "ImageRegistration3 Composition");
}
return 0;
}
import org.itk.simple.*;
import java.text.DecimalFormat;
class IterationUpdate extends Command {
private ImageRegistrationMethod method;
public IterationUpdate(ImageRegistrationMethod m) {
method = m;
}
public void execute() {
if (method.getOptimizerIteration() == 0) {
VectorDouble scales = method.getOptimizerScales();
System.out.print("Estimated Scales: [" + scales.get(0));
for (int i = 1; i < scales.size(); i++) {
System.out.print(", " + scales.get(i));
}
System.out.println("]");
}
VectorDouble pos = method.getOptimizerPosition();
DecimalFormat df = new DecimalFormat("0.00000");
System.out.print(String.format("%3d = %7s : [",
method.getOptimizerIteration(),
df.format(method.getMetricValue())));
System.out.print(df.format(pos.get(0)));
for (int i = 1; i < pos.size(); i++) {
System.out.print(", " + df.format(pos.get(i)));
}
System.out.println("]");
}
}
public class ImageRegistrationMethod3 {
public static void main(String[] args) throws Exception {
if (args.length < 3) {
System.out.println("Usage: ImageRegistrationMethod3 <fixedImageFile> <movingImageFile> <outputTransformFile>");
System.exit(1);
}
Image fixed = SimpleITK.readImage(args[0], PixelIDValueEnum.sitkFloat32);
Image moving = SimpleITK.readImage(args[1], PixelIDValueEnum.sitkFloat32);
ImageRegistrationMethod R = new ImageRegistrationMethod();
R.setMetricAsCorrelation();
R.setOptimizerAsRegularStepGradientDescent(2.0, // learningRate
1e-4, // minStep
500, // numberOfIterations
0.5, // relaxationFactor
1e-8); // gradientMagnitudeTolerance
R.setOptimizerScalesFromIndexShift();
Transform tx = SimpleITK.centeredTransformInitializer(fixed, moving, new Similarity2DTransform());
R.setInitialTransform(tx);
R.setInterpolator(InterpolatorEnum.sitkLinear);
IterationUpdate cmd = new IterationUpdate(R);
R.addCommand(EventEnum.sitkIterationEvent, cmd);
Transform outTx = R.execute(fixed, moving);
System.out.println("-------");
System.out.println(outTx.toString());
System.out.println("Optimizer stop condition: " + R.getOptimizerStopConditionDescription());
System.out.println(" Iteration: " + R.getOptimizerIteration());
System.out.println(" Metric value: " + R.getMetricValue());
SimpleITK.writeTransform(outTx, args[2]);
ResampleImageFilter resampler = new ResampleImageFilter();
resampler.setReferenceImage(fixed);
resampler.setInterpolator(InterpolatorEnum.sitkLinear);
resampler.setDefaultPixelValue(100);
resampler.setTransform(outTx);
Image output = resampler.execute(moving);
Image simg1 = SimpleITK.cast(SimpleITK.rescaleIntensity(fixed), PixelIDValueEnum.sitkUInt8);
Image simg2 = SimpleITK.cast(SimpleITK.rescaleIntensity(output), PixelIDValueEnum.sitkUInt8);
Image cimg = SimpleITK.compose(simg1, simg2, SimpleITK.divide(SimpleITK.add(simg1, simg2), 2.0));
if (System.getenv("SITK_NOSHOW") == null) {
SimpleITK.show(cimg, "ImageRegistration3 Composition");
}
}
}
#!/usr/bin/env python
""" A SimpleITK example demonstrating image registration using the
correlation metric and the center of mass initial transformation
estimation method. """
import sys
import os
import SimpleITK as sitk
def command_iteration(method):
""" Callback invoked when the optimization has an iteration """
if method.GetOptimizerIteration() == 0:
print("Estimated Scales: ", method.GetOptimizerScales())
print(
f"{method.GetOptimizerIteration():3} "
+ f"= {method.GetMetricValue():7.5f} "
+ f": {method.GetOptimizerPosition()}"
)
def main(args):
""" A SimpleITK example demonstrating image registration using the
correlation metric and the center of mass initial transformation
estimation method. """
if len(args) < 3:
print(
"Usage:",
"ImageRegistrationMethod3"
"<fixedImageFilter> <movingImageFile> <outputTransformFile>",
)
sys.exit(1)
fixed = sitk.ReadImage(args[1], sitk.sitkFloat32)
moving = sitk.ReadImage(args[2], sitk.sitkFloat32)
R = sitk.ImageRegistrationMethod()
R.SetMetricAsCorrelation()
R.SetOptimizerAsRegularStepGradientDescent(
learningRate=2.0,
minStep=1e-4,
numberOfIterations=500,
gradientMagnitudeTolerance=1e-8,
)
R.SetOptimizerScalesFromIndexShift()
tx = sitk.CenteredTransformInitializer(fixed, moving, sitk.Similarity2DTransform())
R.SetInitialTransform(tx)
R.SetInterpolator(sitk.sitkLinear)
R.AddCommand(sitk.sitkIterationEvent, lambda: command_iteration(R))
outTx = R.Execute(fixed, moving)
print("-------")
print(outTx)
print(f"Optimizer stop condition: {R.GetOptimizerStopConditionDescription()}")
print(f" Iteration: {R.GetOptimizerIteration()}")
print(f" Metric value: {R.GetMetricValue()}")
sitk.WriteTransform(outTx, args[3])
resampler = sitk.ResampleImageFilter()
resampler.SetReferenceImage(fixed)
resampler.SetInterpolator(sitk.sitkLinear)
resampler.SetDefaultPixelValue(100)
resampler.SetTransform(outTx)
out = resampler.Execute(moving)
simg1 = sitk.Cast(sitk.RescaleIntensity(fixed), sitk.sitkUInt8)
simg2 = sitk.Cast(sitk.RescaleIntensity(out), sitk.sitkUInt8)
cimg = sitk.Compose(simg1, simg2, simg1 // 2.0 + simg2 // 2.0)
# Run with:
#
# Rscript --vanilla ImageRegistrationMethod3.R fixedImageFilter movingImageFile outputTransformFile
#
library(SimpleITK)
commandIteration <- function(method)
{
if (method$GetOptimizerIteration()==0) {
cat("Estimated Scales:", method$GetOptimizerScales())
}
msg <- paste(method$GetOptimizerIteration(), "=",
method$GetMetricValue(), ":",
method$GetOptimizerPosition(), "\n" )
cat(msg)
}
args <- commandArgs( TRUE )
if (length(args) != 3) {
stop("3 arguments expected - fixedImageFilter, movingImageFile, outputTransformFile")
}
pixelType <- 'sitkFloat32'
fixed <- ReadImage(args[[1]], 'sitkFloat32')
moving <- ReadImage(args[[2]], 'sitkFloat32')
R <- ImageRegistrationMethod()
R$SetMetricAsCorrelation()
R$SetOptimizerAsRegularStepGradientDescent(learningRate=2.0,
minStep=1e-4,
numberOfIterations=500,
relaxationFactor=0.5,
gradientMagnitudeTolerance=1e-8 )
R$SetOptimizerScalesFromIndexShift()
tx <- CenteredTransformInitializer(fixed, moving, Similarity2DTransform())
R$SetInitialTransform(tx)
R$SetInterpolator('sitkLinear')
R$AddCommand( 'sitkIterationEvent', function() commandIteration(R) )
outTx <- R$Execute(fixed, moving)
cat("-------\n")
outTx
cat("Optimizer stop condition:", R$GetOptimizerStopConditionDescription(), '\n')
cat("Iteration:", R$GetOptimizerIteration(), '\n')
cat("Metric value:", R$GetMetricValue(), '\n')
WriteTransform(outTx, args[[3]])